Summary of current model architecture and key hyper parameters 🧪 Setting up navigation simulator… ✅ Navigation simulator ready! Mode: Goal-Aware Device: cpu Model architecture: 11 → 256 → 128 → 4
Neural network model evaluation current results
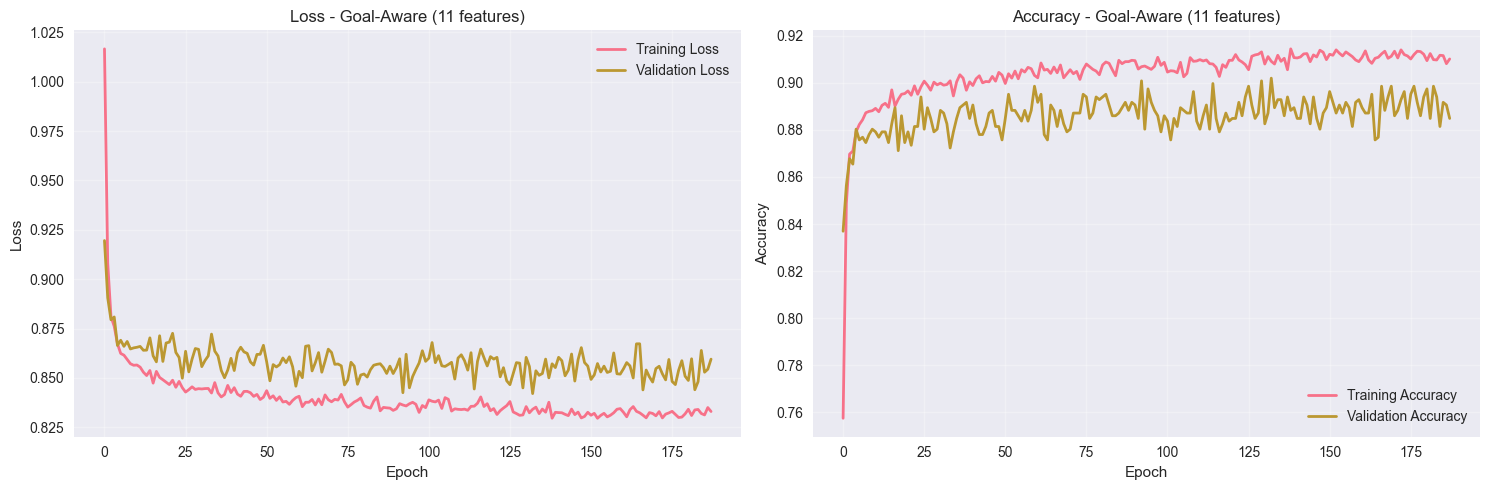
📊 Training Analysis:
Training Accuracy: 0.9101 (91.0%)
Validation Accuracy: 0.8848 (88.5%)
Overfitting Gap: 0.0253 (2.5%)
✅ Excellent: No overfitting
🧭 Goal-Aware Navigation Analysis: Correct predictions: 789 Avg distance to goal: 4.7 steps
Incorrect predictions: 88 Avg distance to goal: 6.2 steps Goal alignment score: 4/4 (100%) ✅ Excellent goal-aware navigation!
🎯 Goal reaching evaluation current results
The Ultimate Test: Can the robot actually navigate to goals? This section tests if our trained neural network can successfully guide a robot from start to goal positions, not just predict individual actions correctly.
🧪 Evaluating navigation on 50 environments… Progress: 50/50 environments Success rate: 66.0% Average steps: 8.8 Average path efficiency: 0.99 Average collisions: 0.0
📊 NAVIGATION EVALUATION RESULTS 🎯 Success Rate: 66.0% (33/50) 📏 Average Steps: 8.8 ⚡ Path Efficiency: 0.99 💥 Average Collisions: 0.0 📐 Average Final Distance: 1.6 ✅ Good navigation performance
Successful navigations: 33 Failed navigations: 17
| Metric | Description | What It Measures |
|---|---|---|
| Success Rate | % of attempts that reach goal | Overall navigation capability |
| Path Efficiency | Actual path / Optimal A* path | How close to optimal routing |
| Collision Rate | % of steps that hit obstacles | Obstacle avoidance skill |
| Average Steps | Mean steps to reach goal | Navigation efficiency |
| Final Distance | Distance to goal when stopped | How close robot gets |
What is Goal-Reaching Evaluation?
The Problem: Action prediction accuracy (e.g., “85% correct”) doesn’t tell us if the robot can actually navigate to destinations.
The Solution: Goal-reaching evaluation tests if the trained neural network can successfully guide a robot from start to goal positions in real environments.
Interpreting Results
Success Rate
- ≥80%: ✅ Excellent - Robot reliably reaches goals
- 60-79%: ✅ Good - Minor improvements needed
- 40-59%: ⚠️ Moderate - Needs retraining
- <40%: ❌ Poor - Major issues
Path Efficiency
- ≥0.9: ✅ Excellent - Near-optimal routes
- 0.7-0.9: ✅ Good - Reasonable routes
- <0.7: ⚠️ Poor - Inefficient routing
Collision Rate
- <5%: ✅ Excellent - Rarely hits obstacles
- 5-15%: ✅ Good - Occasional collisions
- >15%: ⚠️ Poor - Frequent collisions
Example Results
Excellent Performance:
🎯 Success Rate: 87.5% (35/40)
📏 Average Steps: 12.3
⚡ Path Efficiency: 0.89
💥 Average Collisions: 0.8
📐 Average Final Distance: 0.2
Needs Improvement:
🎯 Success Rate: 45.0% (18/40)
📏 Average Steps: 25.7
⚡ Path Efficiency: 0.52
💥 Average Collisions: 8.2
📐 Average Final Distance: 3.8
Troubleshooting
Low Success Rate (<60%)
- Cause: Model undertrained or poor hyperparameters
- Solution: Increase training epochs, adjust learning rate
High Collision Rate (>15%)
- Cause: Poor obstacle avoidance
- Solution: Check perception extraction, increase obstacle training data
Poor Path Efficiency (<0.7)
- Cause: Inefficient routing decisions
- Solution: Verify goal_delta features are working correctly
Key Insight
Action prediction accuracy ≠ Real navigation success
A model with 90% action accuracy but 30% goal-reaching success is not ready for real navigation. Goal-reaching evaluation ensures your robot can actually get where it needs to go!
Quick Checklist
- Train your model (Cells 1-9)
- Setup navigation simulator (Cell 11)
- Generate test environments (Cell 12)
- Run evaluation (Cell 13)
- View visualizations (Cell 14)
- Analyze performance (Cell 15)
- Success Rate ≥80%? ✅ Ready for deployment
- Path Efficiency ≥0.8? ✅ Good routing
- Collisions <5%? ✅ Safe navigation